8 legged spider robot


DESCRIPTION
DETAILS
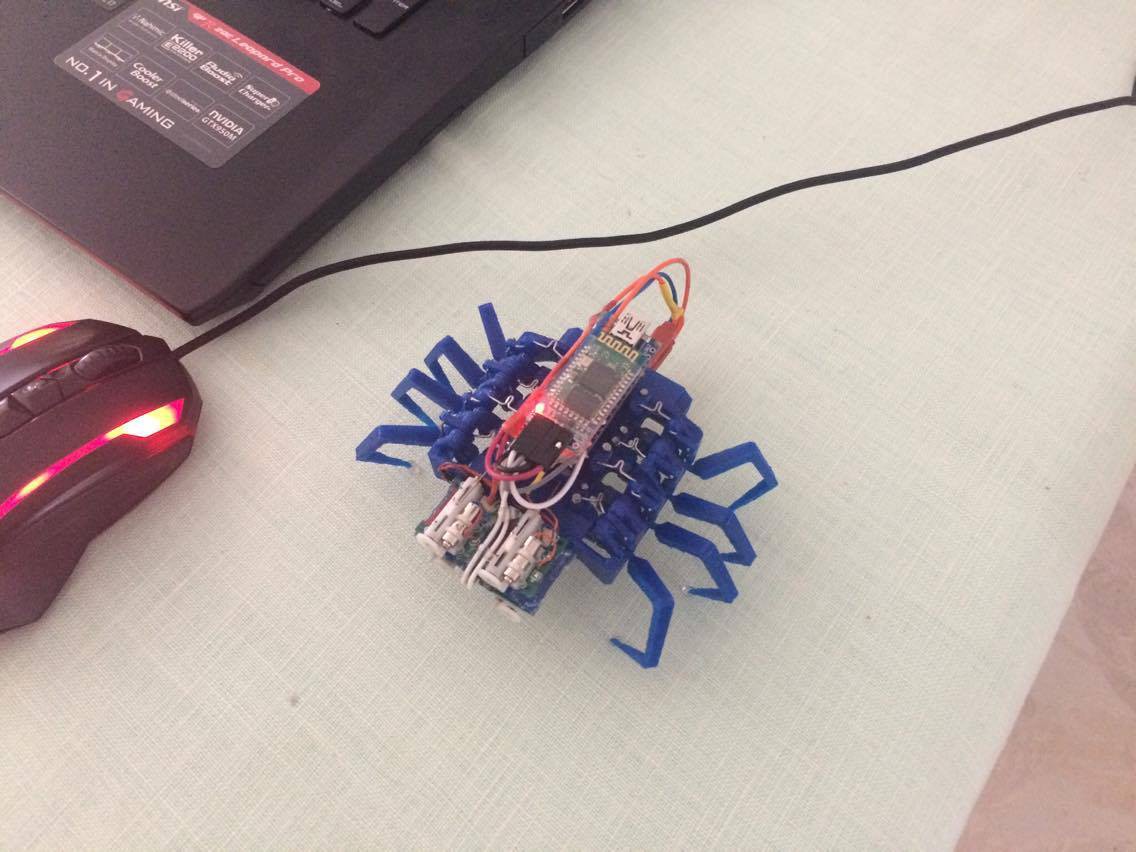
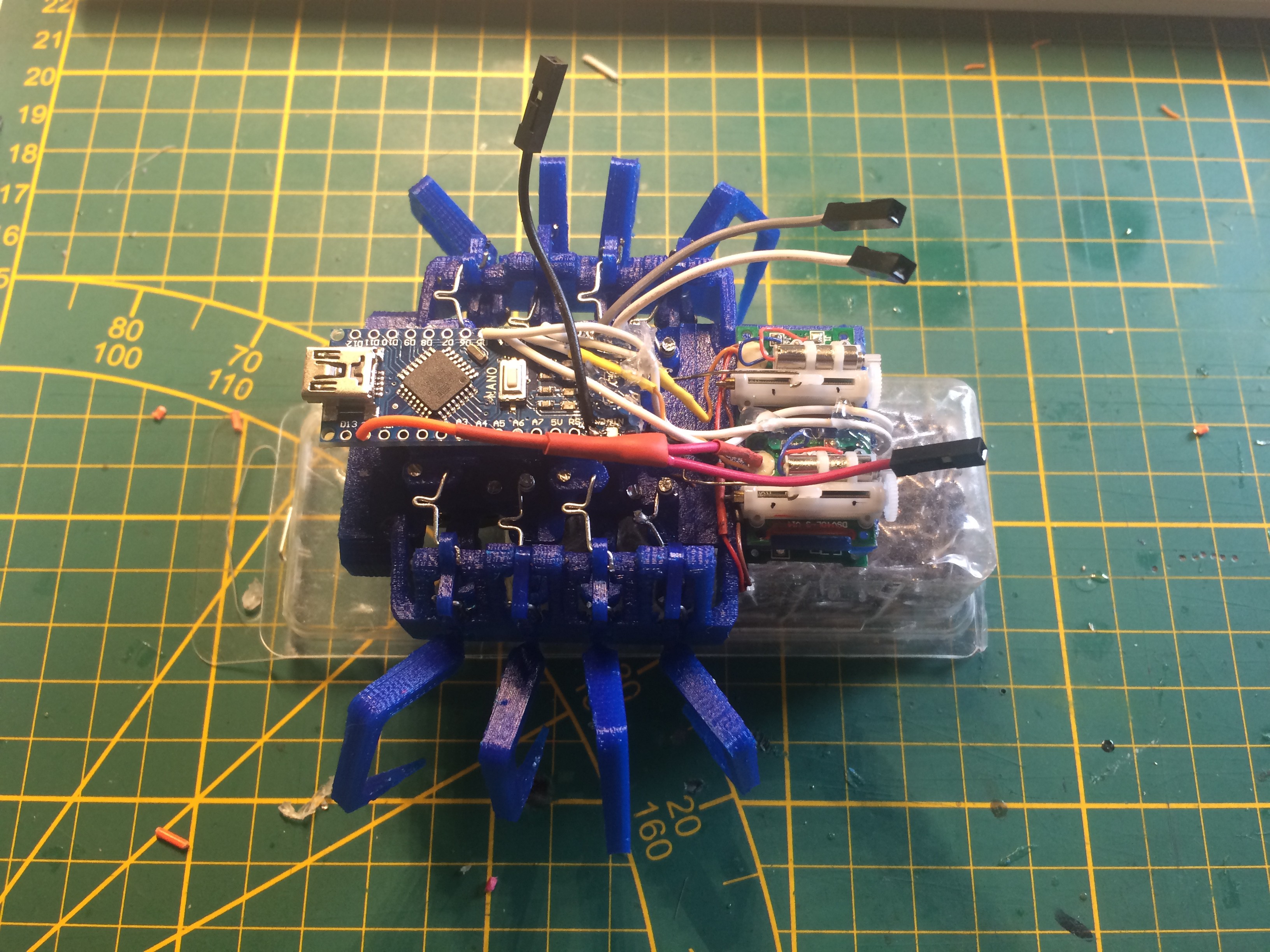
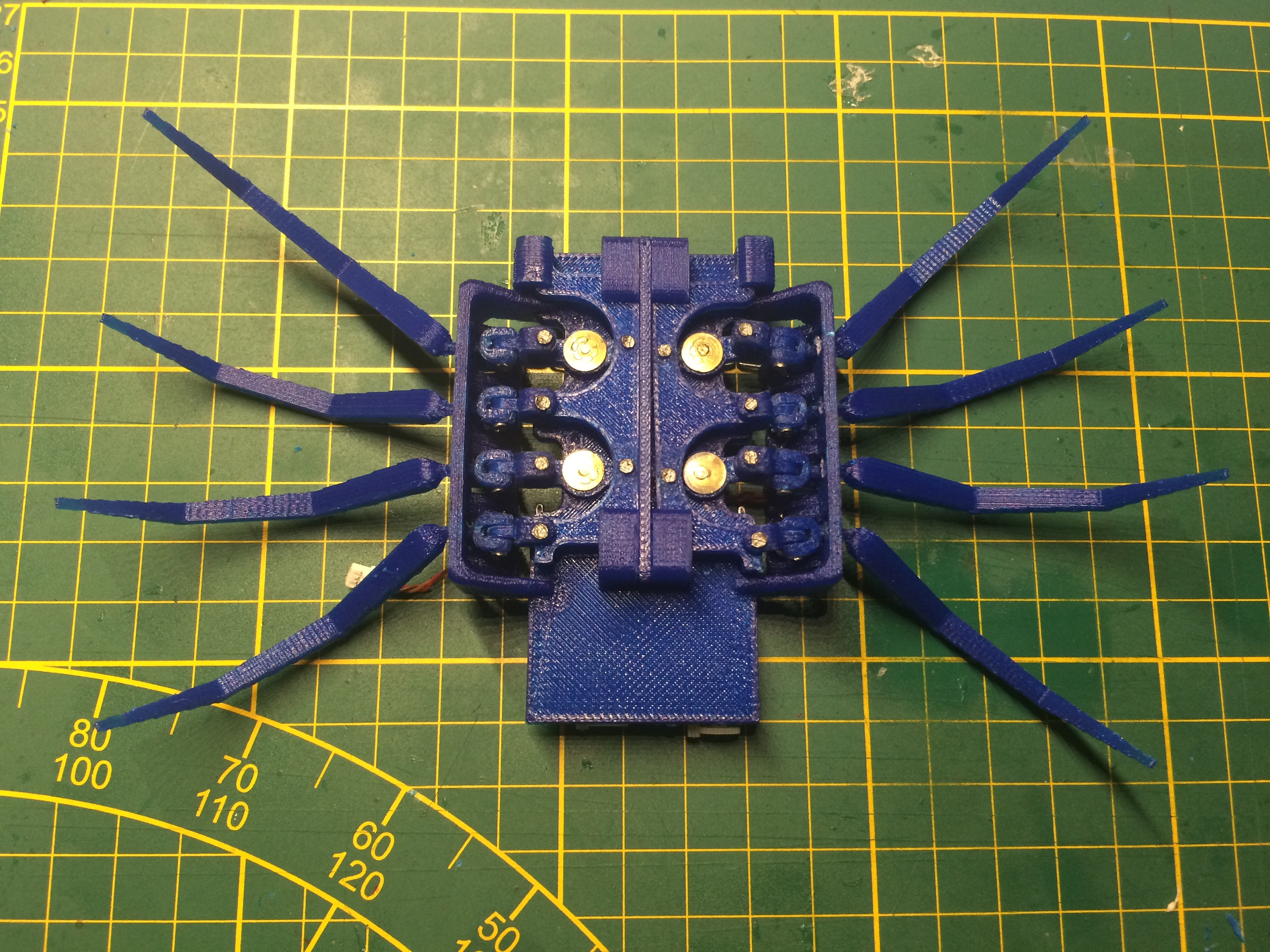
This spider like robot uses only 4 micro servo's salvaged from old and broken indoor rc-planes and helicopters. these servo's are controlled by an arduino nano and powered by two 1 cell 200mAh lipo battery's. So I eventually made a 2 cell lipo instead of my original idee of using a single cell lipo battery. So now I have 2 voltages: 7.4 volts wich goes to the Vin pin on the arduino nano and 3.7 Volts wich goes directly to the servo's and the bluetooth module. To control the movements of the robot I use a Geekcreit HC-06 Wireless Bluetooth Transceiver connected to an android device. All parts are designed by me and printed with my 3D-printer in PLA plastic. I have uploaded all the part files in the files section on this page and also on thingiverse. And I also added a complete version of the robot in the download link so you can see how it works.
video:
FILES
STL-files and the Fusion 360 source files can be downloaded here: https://bbprojects.technology/stl-fusion-360-source-files/8-legged-spider-robot-files
COMPONENTS
| QUANTITY | COMPONENT NAME | |
| 1 | × | arduino nano V3 link: http://www.amazon.nl/dp/B0725CFKWK/ref=nosim?tag=bbrocken-21 |
| 1 | × | Geekcreit® HC-06 Wireless Bluetooth Transceiver link: http://www.amazon.nl/dp/B07MFR75BS/ref=nosim?tag=bbrocken-21 |
| 2 | × | 1 cell 300 mAh LIPO battery link: http://www.amazon.nl/dp/B09R7F1VV5/ref=nosim?tag=bbrocken-21 |
| 63 | × | plastic 3D printed parts: https://bbprojects.technology/collections/stl-fusion-360-source-files/products/8-legged-spider-robot-files |
| 4 | × | linear micro servo link: http://www.amazon.nl/dp/B08FBSZXBL/ref=nosim?tag=bbrocken-21 |
| 1 | × | Android device |
PROJECT LOGS
Published a demo/build video
08/01/2017 at 15:39
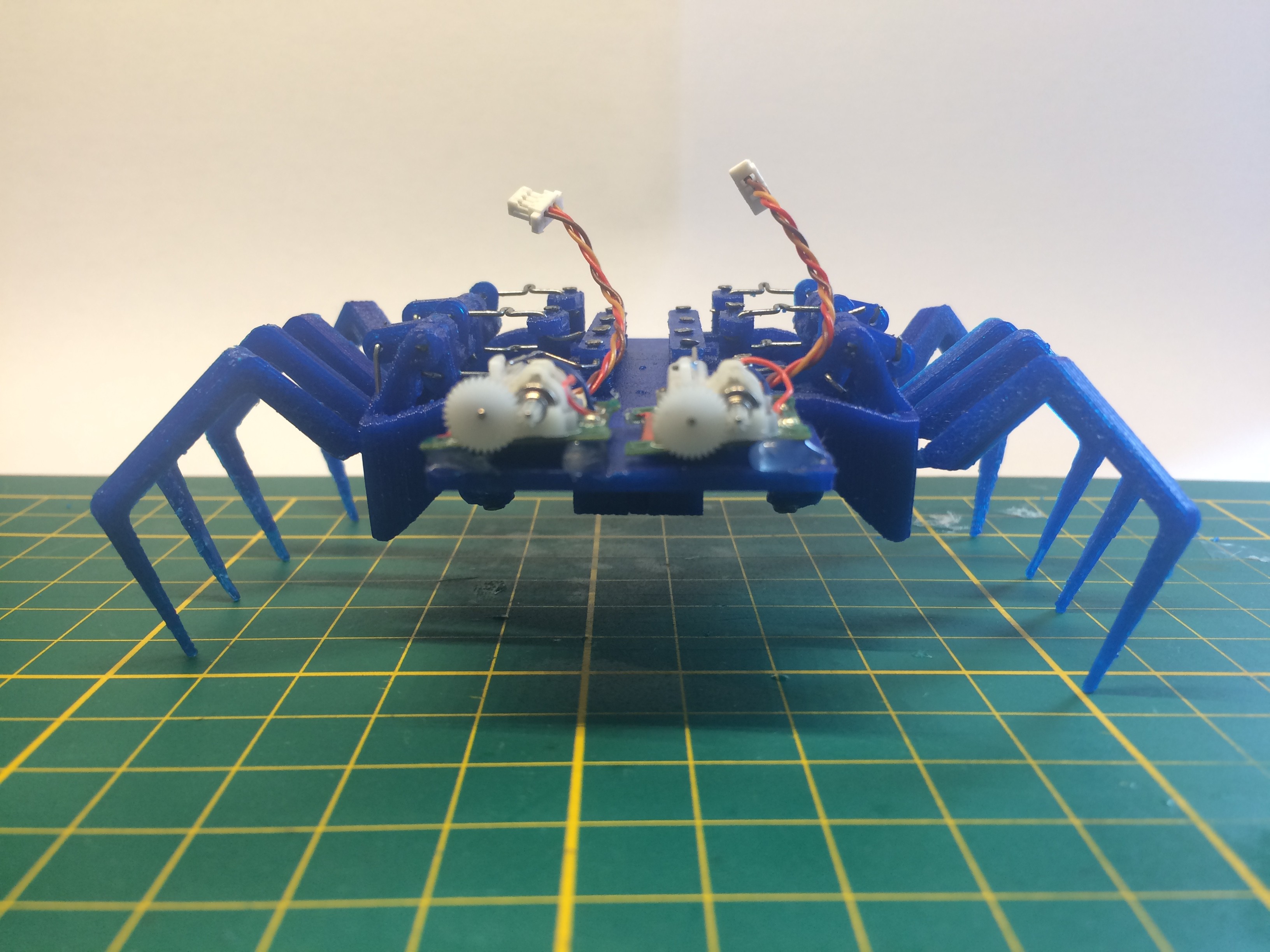
finished and walking !!!
07/31/2017 at 19:38Video of it walking coming soon.

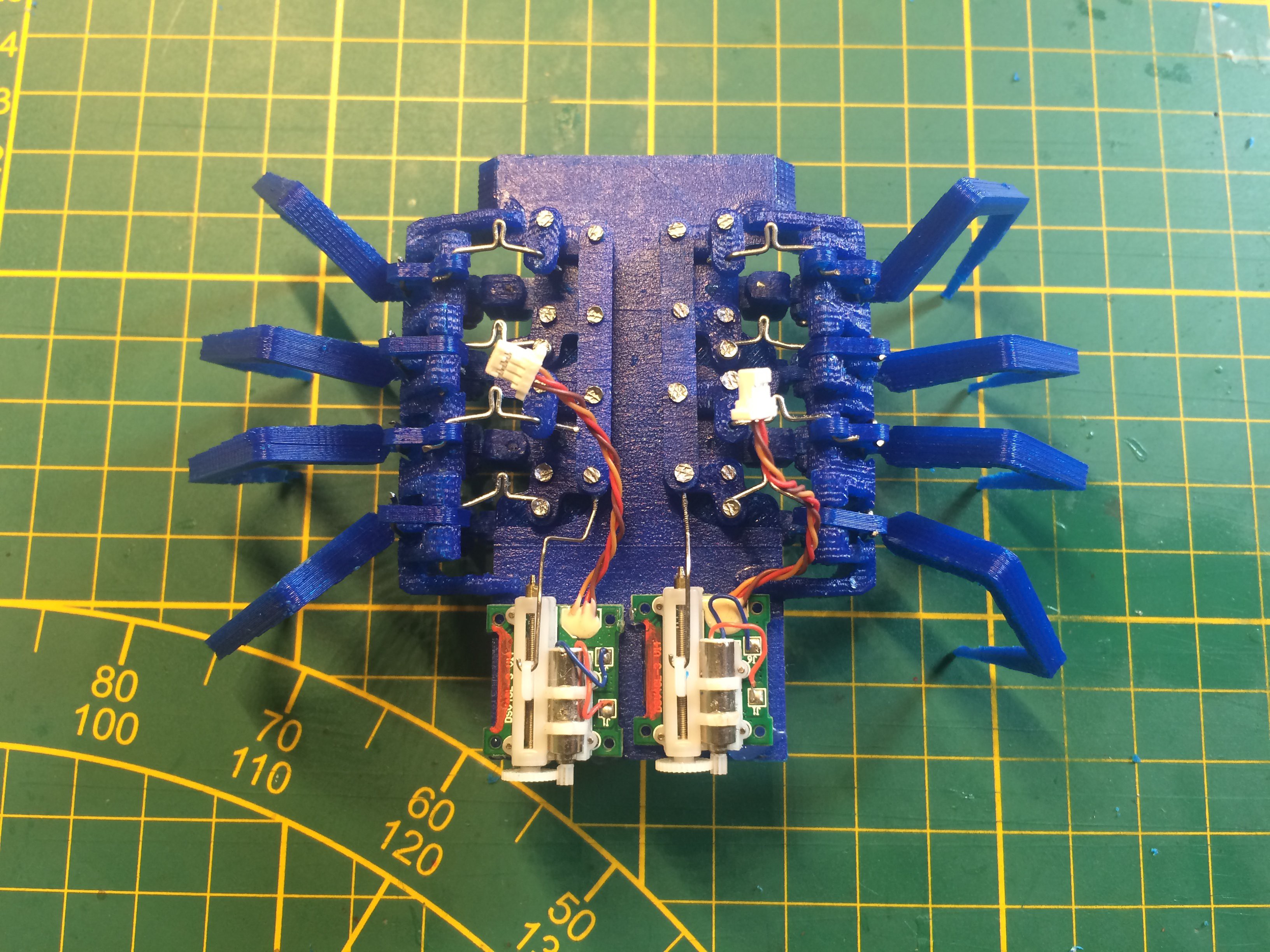
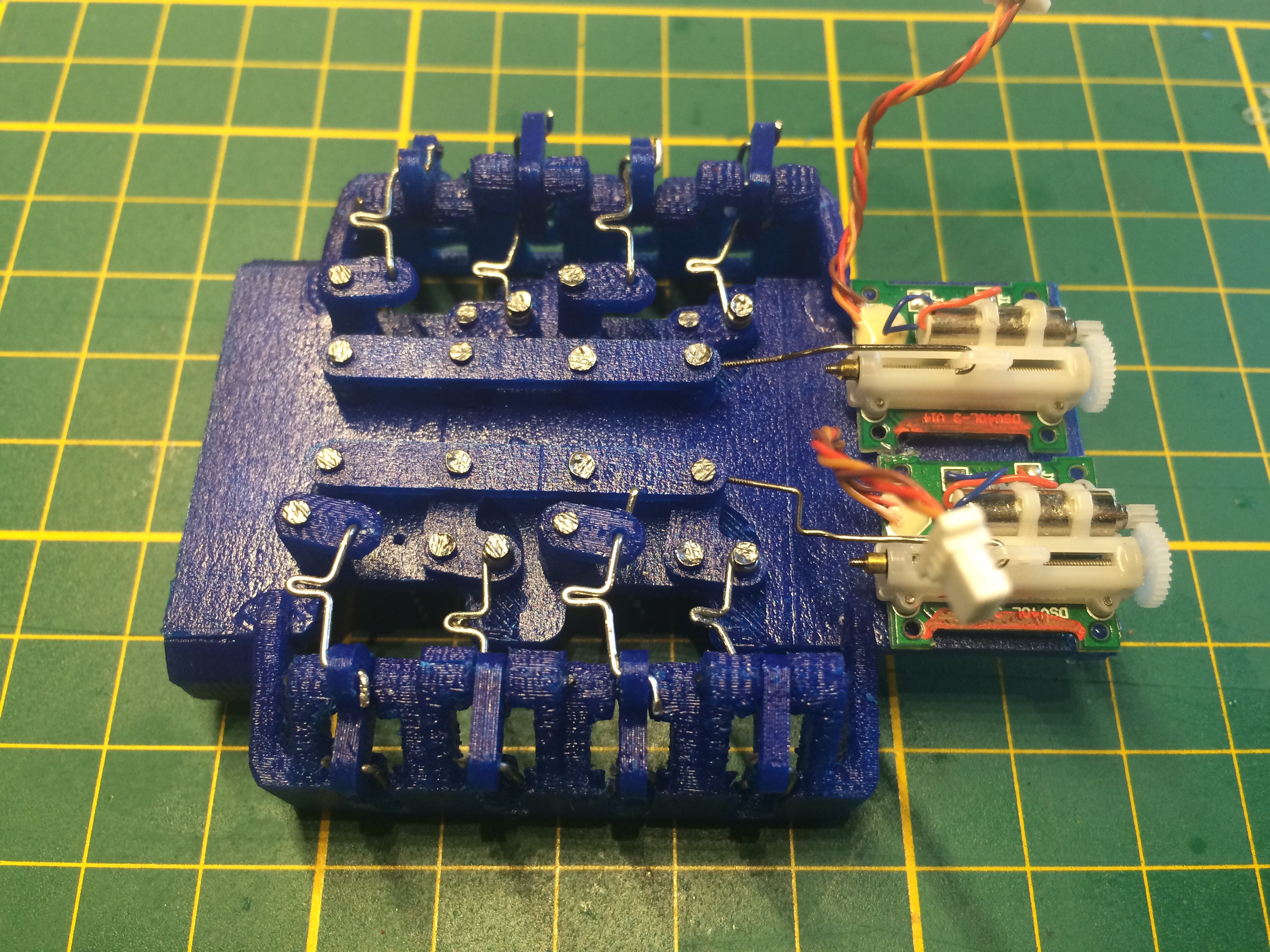
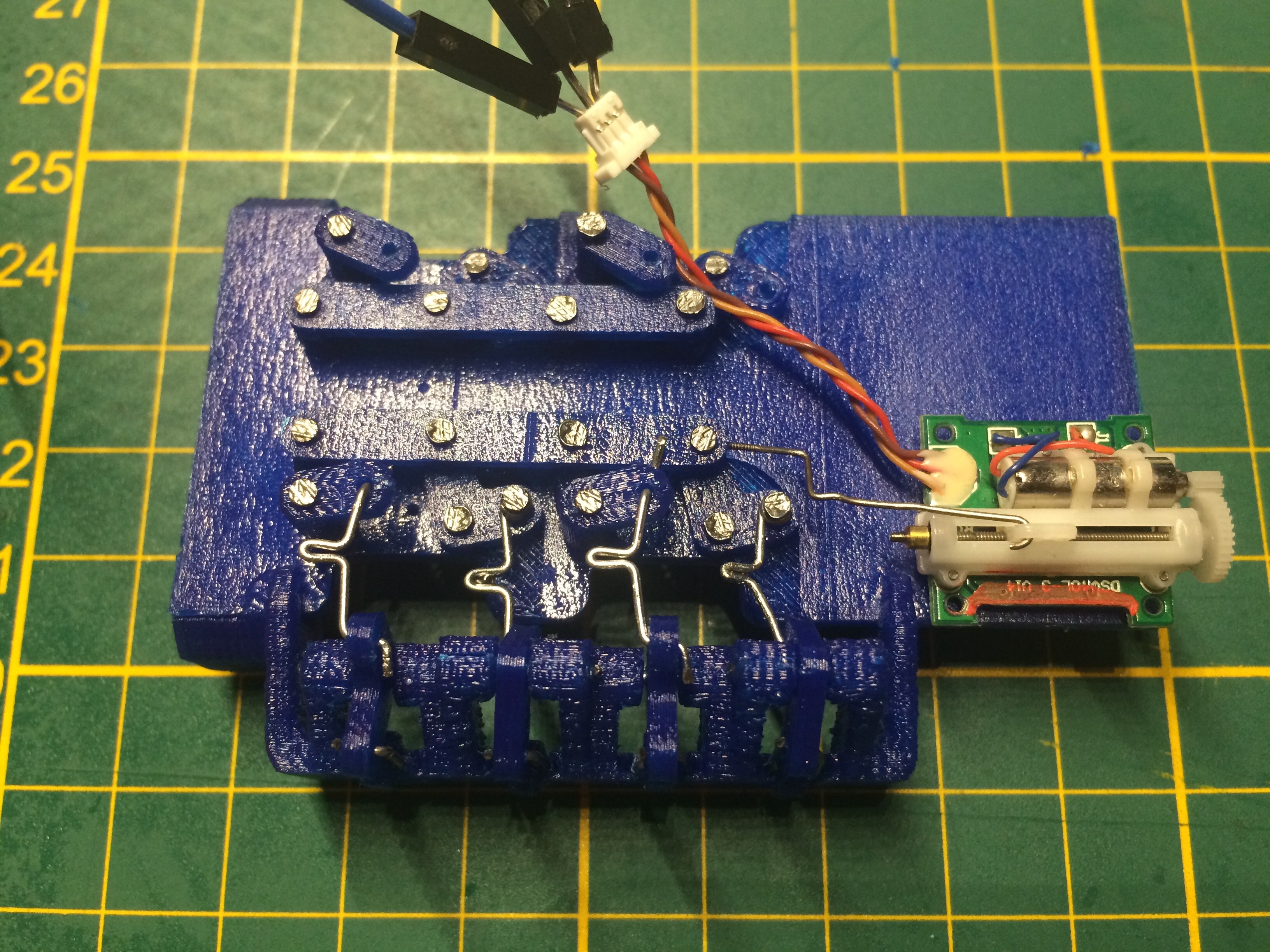
Soldering the wires
07/27/2017 at 17:40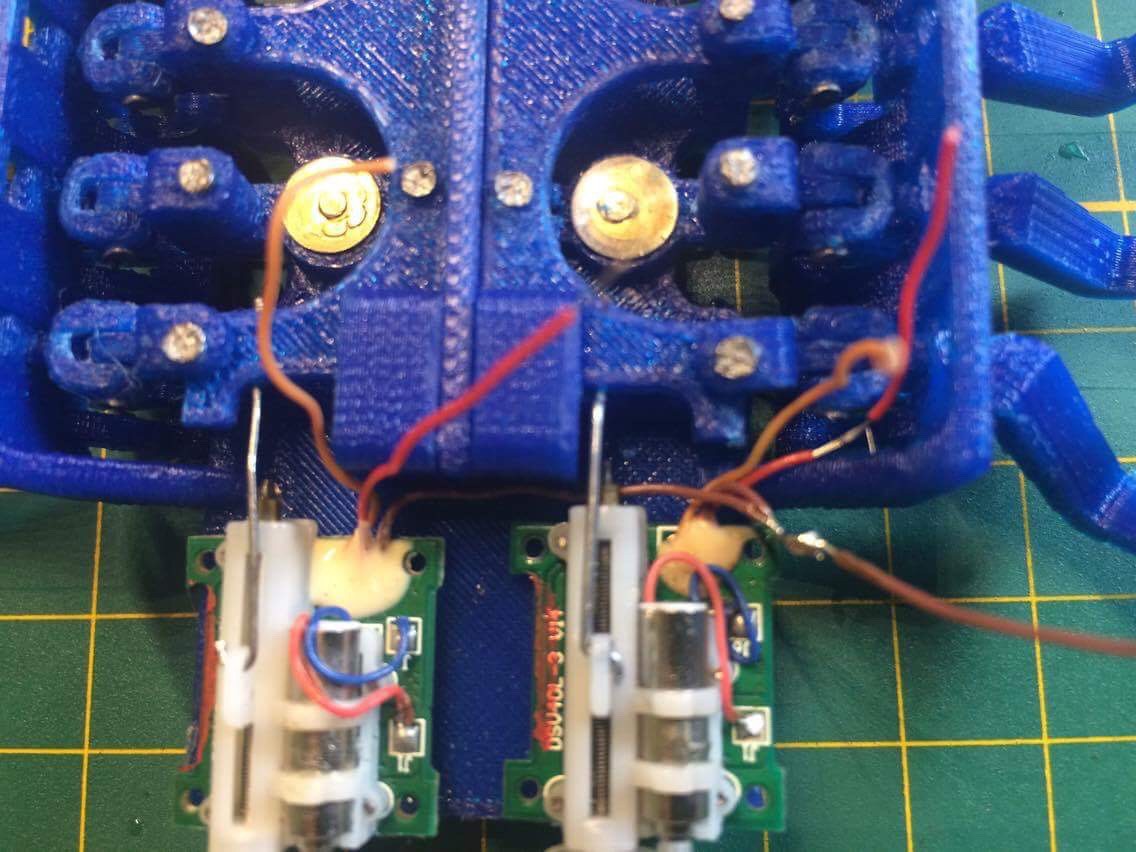
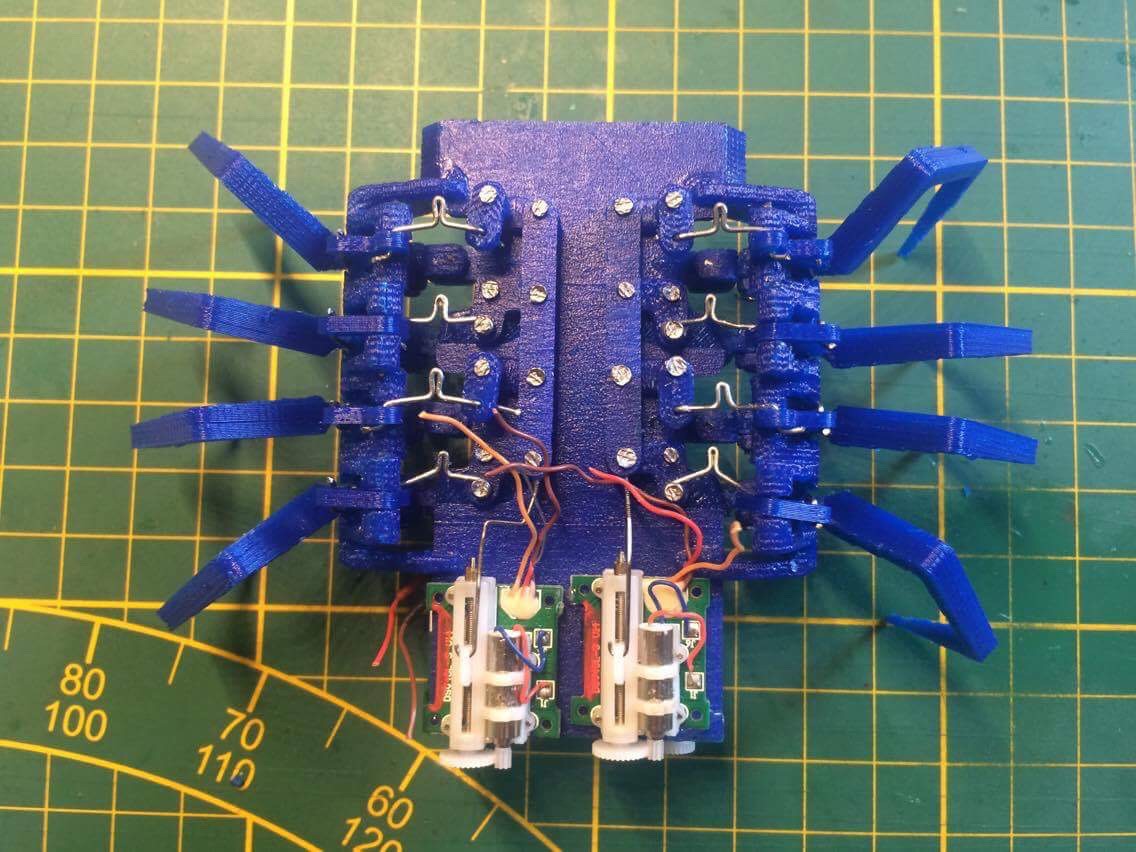
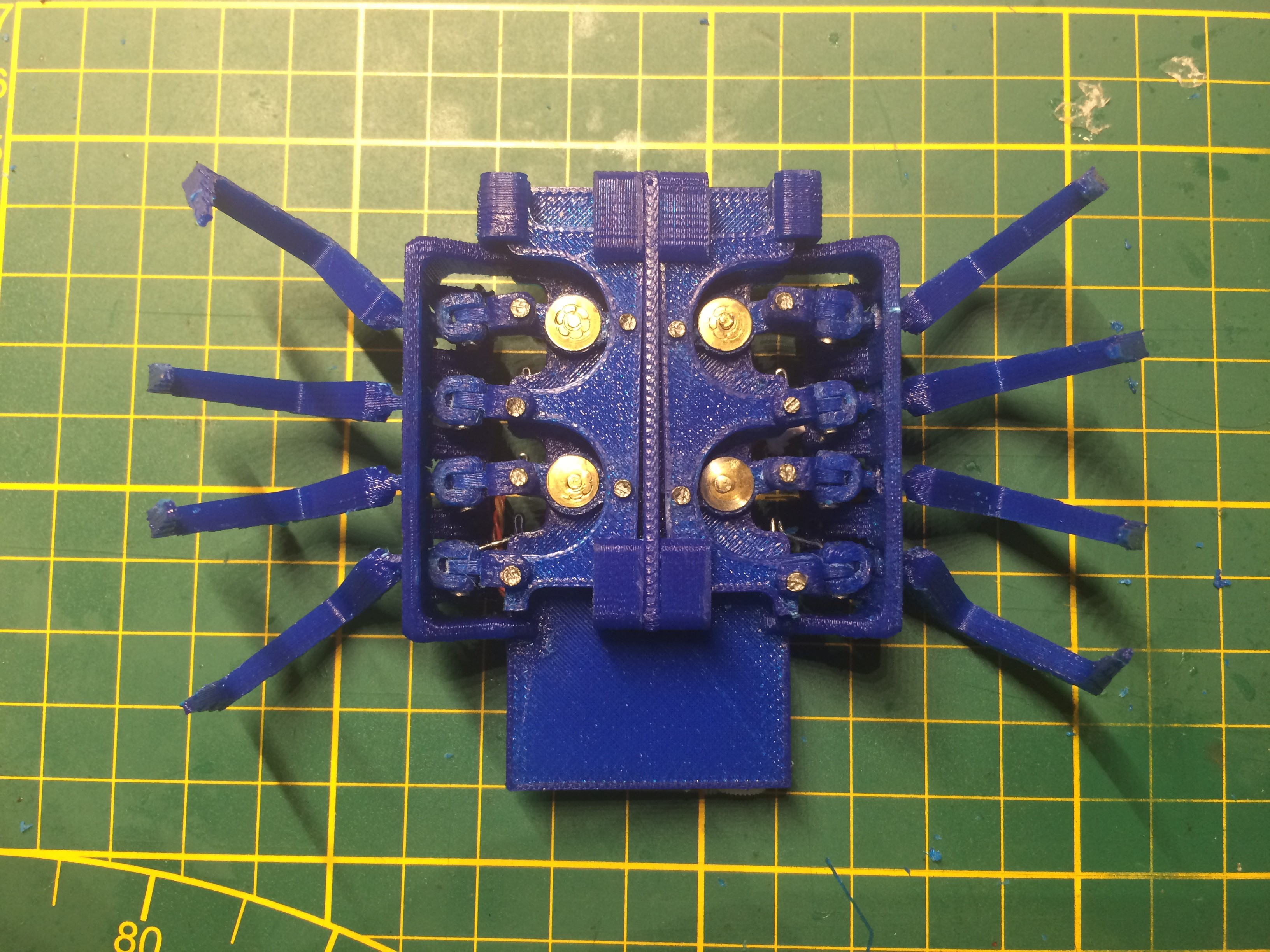
Changed the legs
07/27/2017 at 15:44Unfortunately I had to change the normal legs to smaller legs. It does support the body very well now and the robot is now stable on 8 and even 4 legs
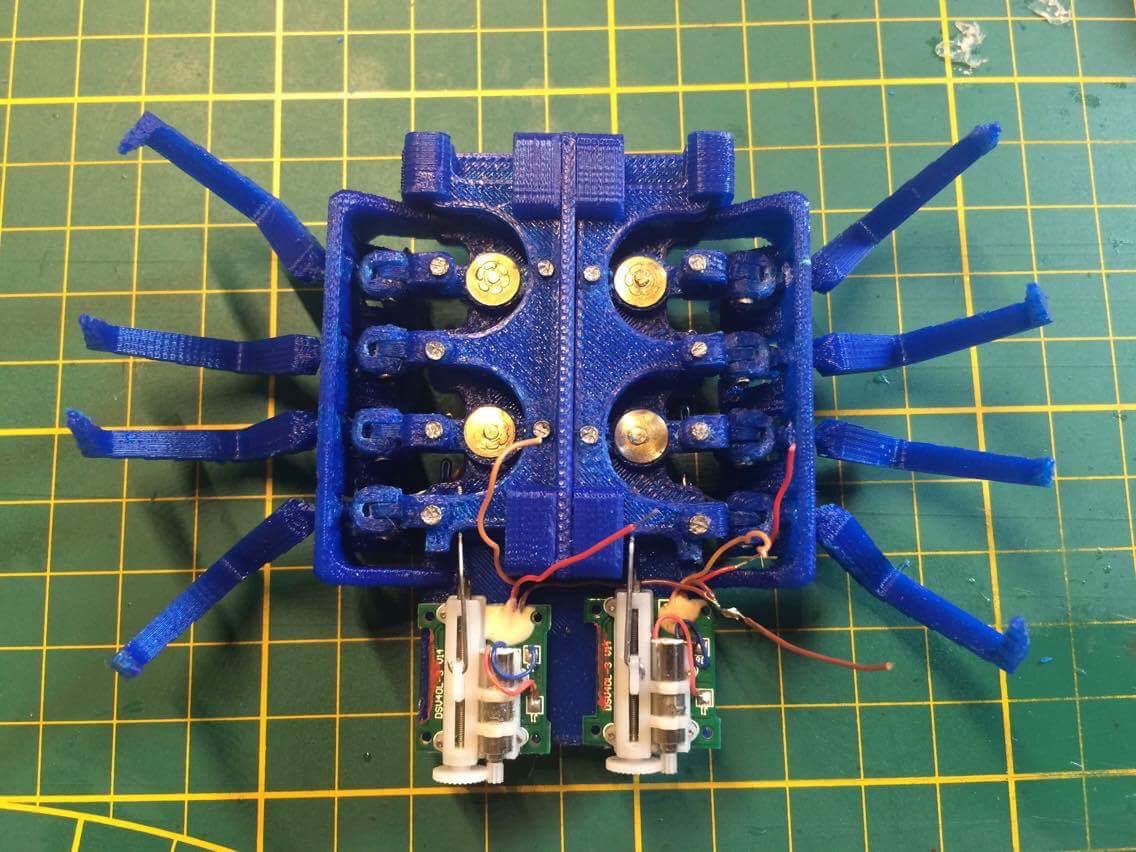
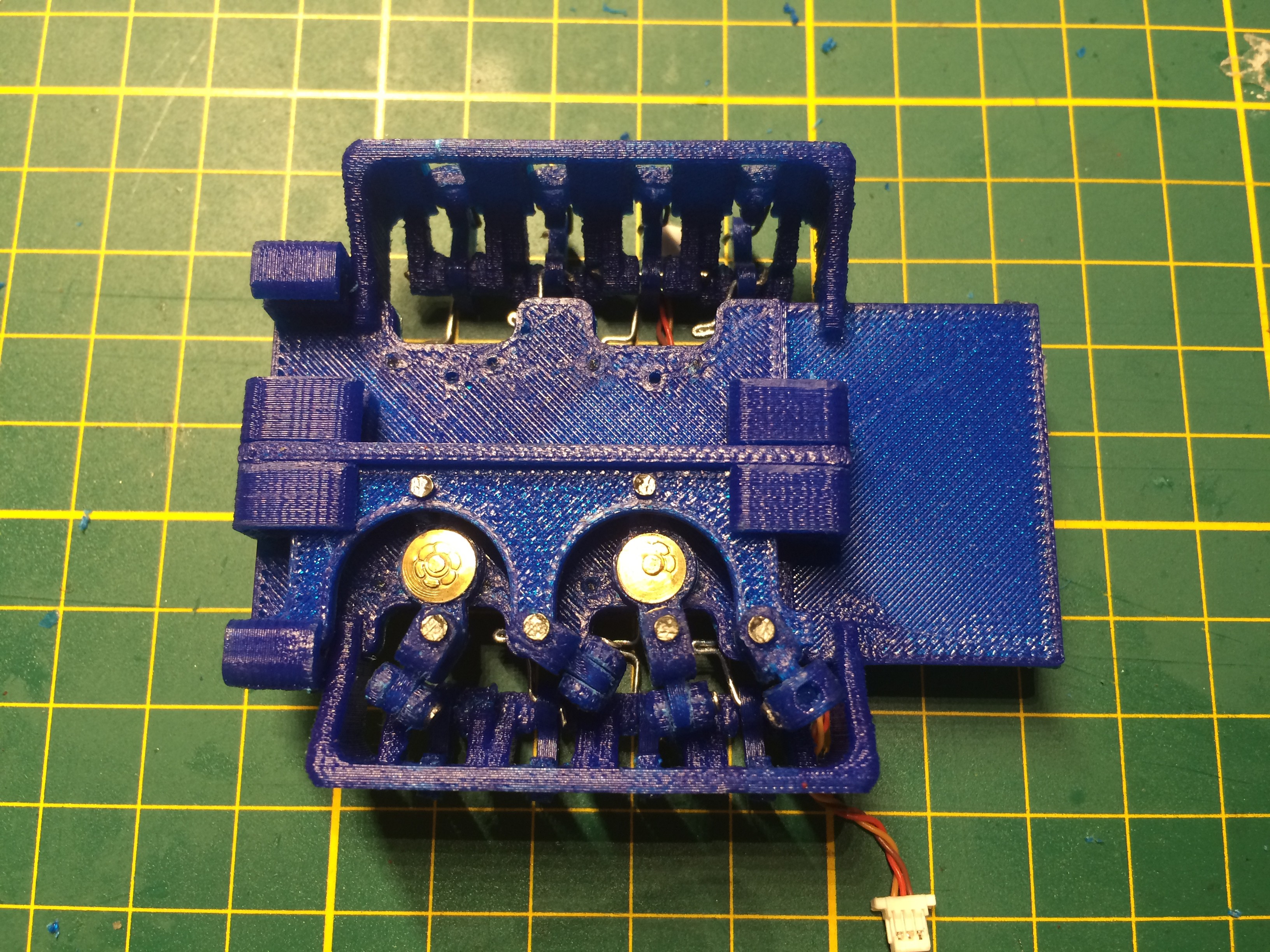
Bottom part almost done and legs attached
07/26/2017 at 19:23
The bottom part is almost done. I just have to place and connect the servo’s. I also attached the legs to see if it would work and they do support the body but just. So I probably going to design some new smaller and higher legs that hopefully do the job.
Starting on the bottom part
07/25/2017 at 22:17
Top part finished
07/25/2017 at 22:15
Starting to move
07/24/2017 at 20:33
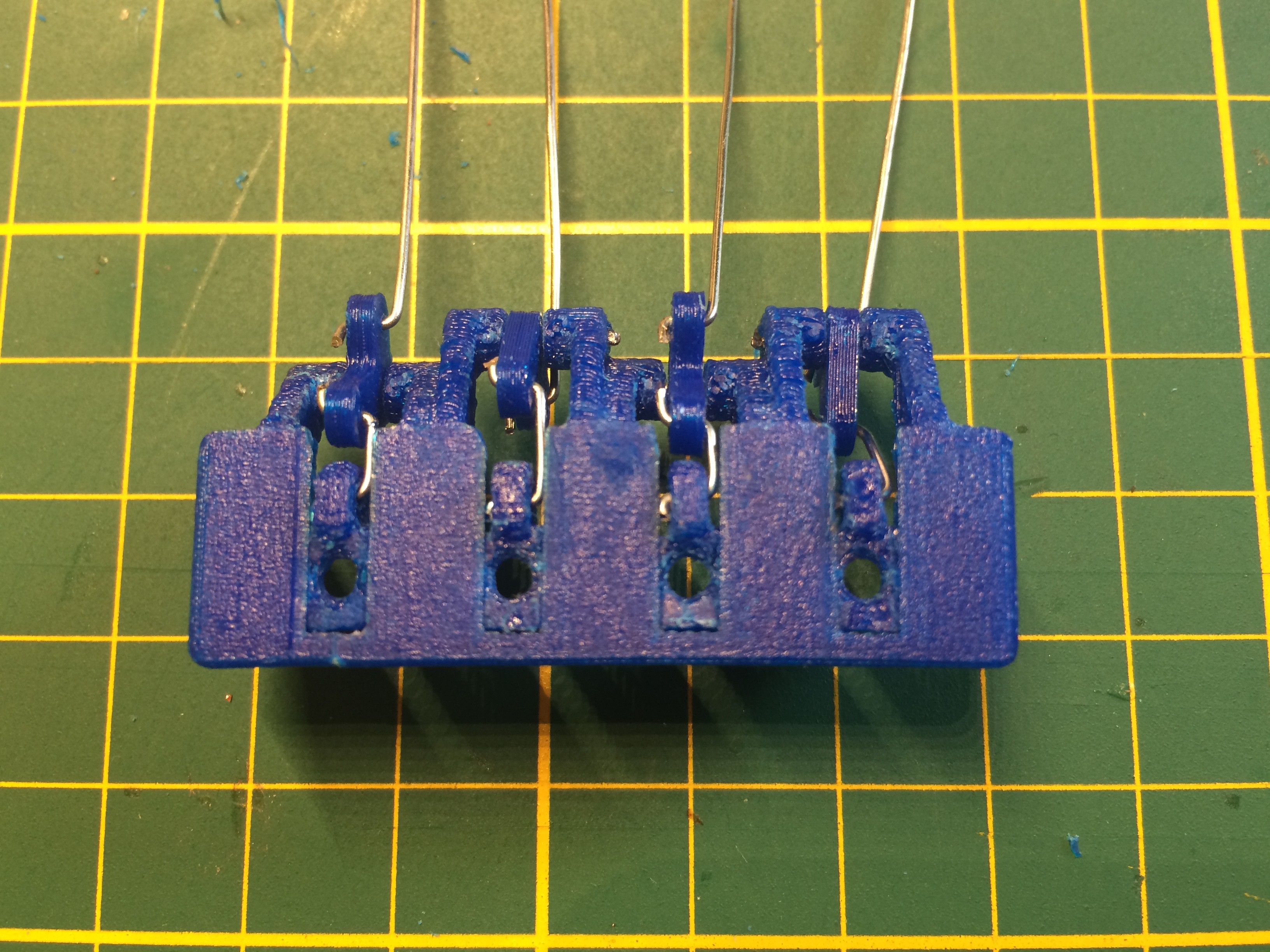
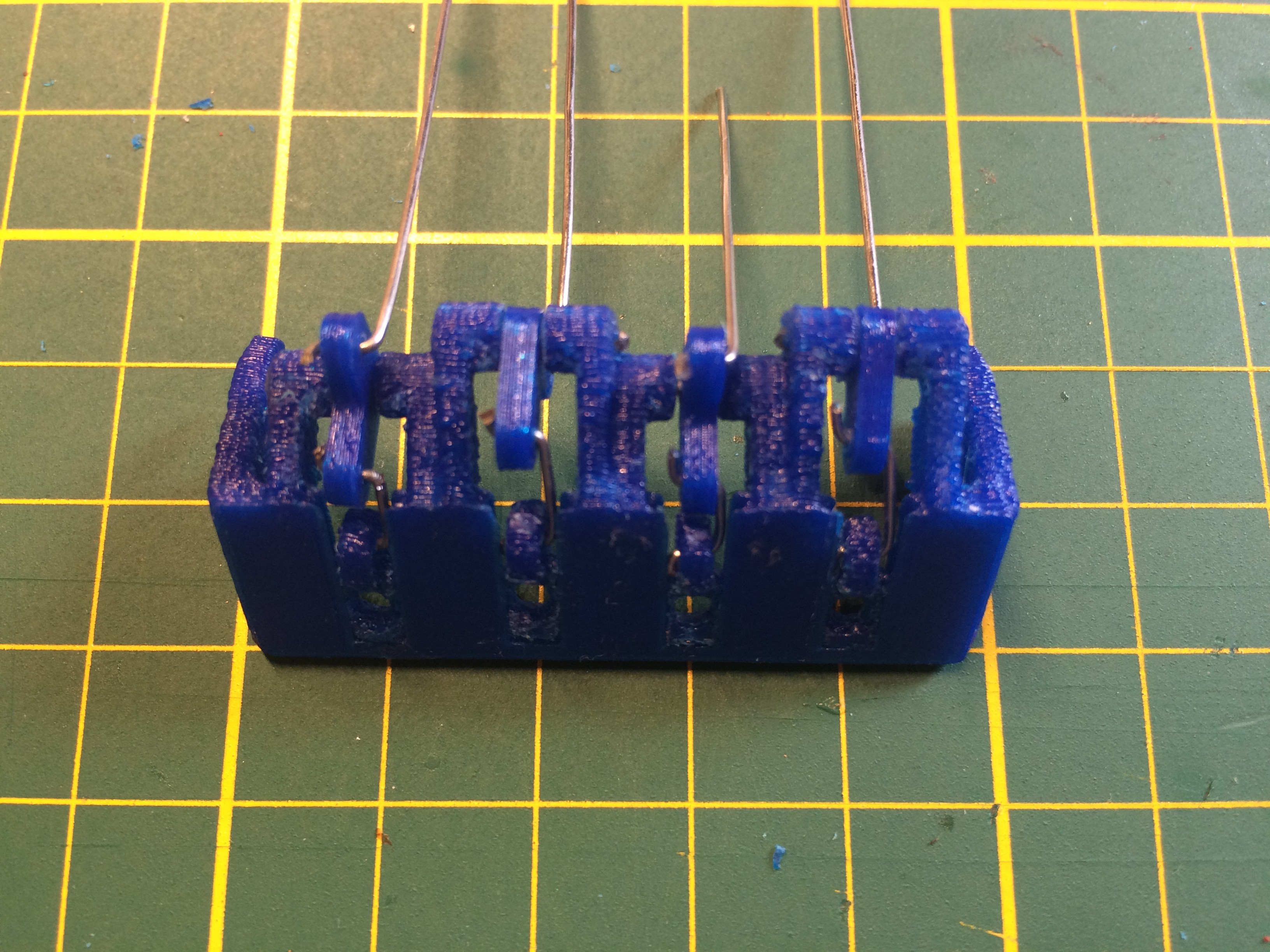
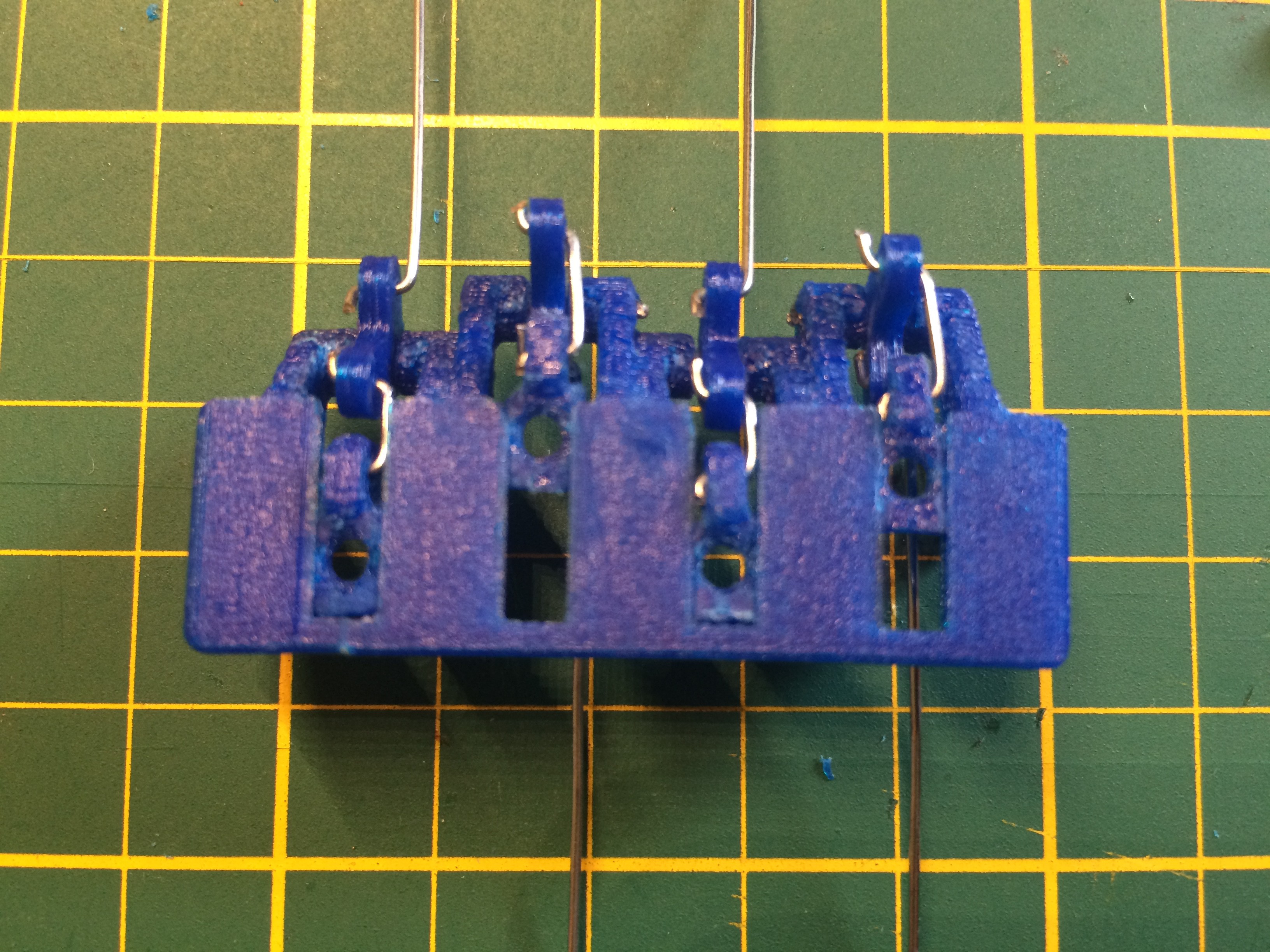
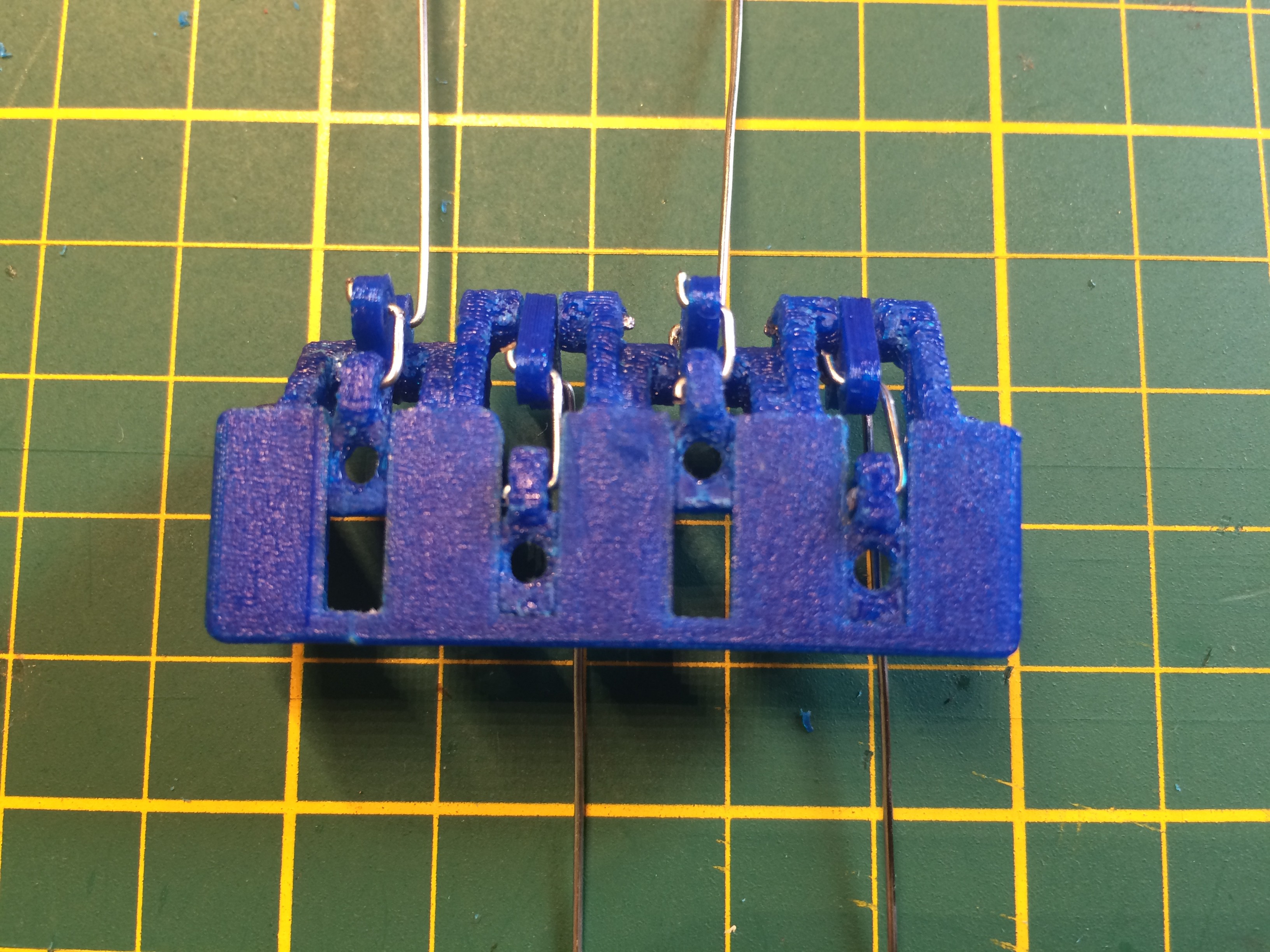
Prove of concept 2
07/23/2017 at 10:40
I printed and assembled the mechanism to move the arms up and down and it works and moves really nice. I was afraid the sliders would be to small for my printer to print but it came out well. I do had to clean them up afterwards.
Prove of concept
07/22/2017 at 22:34
I printed and assembled one of the mechanisms to move the arms sideways to see if it would work. It turns out it works great. Next I’m going to print the other mechanism (which moves the arms up and down) and if it works I’m going for the complete robot.
